{kind=link}
Our resident electronics expert, Andrew has been busy in the man cave this weekend. After reporting some dampness inside his house he decided to take matters into his own hands. The outcome: ‘Inspecto Roboto’! Andrew has pulled apart his racing drone and a few other bits and pieces to hack together a pretty sweet inspection robot for under the house. Check out his build below. And don’t forget to check out some of his other cool projects on his website.
Some of the Key components
- Lynx motion Tri-Tracks chassis
- 2 x 12V geared DC motors
- LM298 motor controller drivers
- 4s LiPo battery pack
- LED light bar
- Servos
- Taranis hobby RC transmitter
- FRsky receiver
- Teensy 3.2
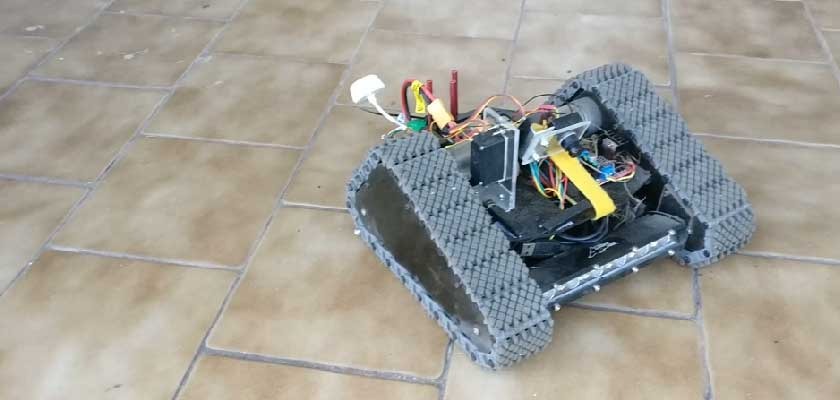
The ‘Inspecto Roboto’ – A confined space inspection robot.
My house has a bit of a moisture problem and I wanted to inspect the floor crawl space to see if there was an obvious fault. It is a horrible cramped environment that whilst I can just wiggle inside the rat carcass at the door confirmed my doubts about venturing any further. So I decided to tackle the problem with robotics!
This was a weekend build and whilst I just used parts lying around I had a lot of nice spares and old projects to work with. Essentially this was a hybrid system using parts from an old racing drone & a lynx motion robotics kit.
Locomotion was a lynx motion Tri-Tracks chassis. It has a nice set of rubberized Tracks as well as an acrylic frame, two 12V geared DC motors and other associated hardware. A basic LM298 motor controller drives each set of tracks from a 4s LiPo battery pack tucked inside. The camera system was from an old racing drone with an FPV display to make driving it around easier. The servo allows for tilting the camera up, panning is just turning the robot on the spot. Finally, a large LED light bar from a vehicle was installed up against the front with some additional acrylic pieces to act as bushes and help retain it in place. The light is controlled via a relay as it is convenient to switch it off when unrequired as it draws about 12W.
The controller was a Taranis hobby RC transmitter paired with a FRsky receiver and a teensy 3.2. The teensy decodes the signals & operates the motors, lights & servo. I have written about using these transmitters with microcontrollers before (Here) and they are a great option for long-range and reliable communication which xBees & other serial radios often struggle with.
The whole system was a bit of a hack but as someone who often spends forever ‘gilding the lily’ on a project until they grow bored of it and don’t finish it, this was a fun and pleasant change.